


Etude de cas d’utilisateur :
Contrôle des vibrations d'un robot à câbles d'entreposage









Défi
Lors de la conception de la robotique pour des applications à grande vitesse sur de grands espaces de travail, les mouvements et les vibrations deviennent de plus en plus difficiles à contrôler avec précision. Dans le cadre du High-Speed Robotics Lab de l'Université de Waterloo, M. Hamed Jamshidifar effectue des recherches sur les technologies qui peuvent contribuer au développement de nouvelles technologies robotiques. Dans le cadre d'un projet récent, M. Jamshidifar avait besoin de nouvelles techniques pour contrôler avec précision le mouvement d'un robot à câble d'entreposage. Les techniques de modélisation dont il avait besoin devaient tenir compte de la dynamique complexe des systèmes de câbles présents dans un tel système robotique.
Solution
M. Jamshidifar a utilisé MapleSim, l'outil de modélisation et de simulation de Maplesoft, pour développer un modèle dynamique du robot à câble d'entreposage. En utilisant la bibliothèque dédiée Ropes and Pulleys de MapleSim, il a pu construire un modèle capable de refléter avec précision le mouvement du robot et ses vibrations indésirables. Avec un modèle suffisamment détaillé dans MapleSim, le Dr Jamshidifar a pu développer et tester des stratégies de contrôle pour maîtriser les vibrations et les oscillations qui se produisent pendant les mouvements du robot et son interaction avec son environnement.
Résultat
En utilisant le modèle développé dans MapleSim, le Dr Jamshidifar a démontré avec succès une solution basée sur la simulation pour contrôler les vibrations du robot. Le modèle a été créé sur la base d'un prototype de robot à petite échelle pour en valider la précision, et les simulations ont montré la présence de vibrations indésirables. Ces vibrations ont été considérablement réduites grâce aux stratégies de contrôle mises en œuvre dans MapleSim. Le Dr Jamshidifar continuera à utiliser les modèles MapleSim pour contrôler et minimiser les vibrations lorsque ces robots seront utilisés dans de futures applications commerciales.
Dans les domaines de l'automatisation industrielle et de la conception robotique, les défis d'ingénierie se présentent à tous les stades du développement. Les machines sont souvent destinées à fonctionner aussi vite que possible, car la vitesse est l'un des facteurs clés de l'efficacité d'un environnement industriel. Cependant, la vitesse croissante de ces machines entraîne des problèmes nouveaux et complexes à résoudre. Lorsque les machines tournent à grande vitesse, les changements de direction et de vitesse peuvent provoquer des forces importantes sur les composants de la machine. En l'absence de stratégies de contrôle appropriées pour les machines à grande vitesse, les ingénieurs risquent d'endommager les composants de la machine, mettant ainsi en péril la sécurité de la machine et de tout opérateur à proximité.
Dans le cadre du High-Speed Robotics Lab de l'Université de Waterloo, le Dr Hamed Jamshidifar effectue des recherches sur les technologies susceptibles de contribuer au développement de nouvelles technologies robotiques. Il utilise la modélisation et la simulation comme stratégie clé pour mieux comprendre la dynamique de la robotique à grande vitesse. Dans un projet récent, il a étudié la dynamique d'un robot à câble d'entreposage à grande vitesse. Ces robots sont destinés à être utilisés dans les entrepôts, où les produits doivent être déplacés sur de grands espaces de travail à grande vitesse. En tirant parti des systèmes de câbles pour déplacer le robot d'un endroit à l'autre, la conception de M. Jamshidifar peut permettre un fonctionnement plus rapide que les robots d'entreposage traditionnels.
Pour atteindre les vitesses élevées possibles avec la nouvelle conception du robot, le contrôle des mouvements et des vibrations serait un élément crucial du processus de conception. Sans contrôleurs de machine de haute-fidélité, le robot à câbles serait facilement sujet à des vibrations indésirables et à d'autres mouvements involontaires qui entraveraient les performances et risqueraient d'endommager les moteurs d'actionnement et l'environnement. M. Jamshidifar a choisi MapleSim, l'outil de modélisation et de simulation de Maplesoft, comme technologie clé pour comprendre la dynamique du robot et développer des systèmes de contrôle capables de minimiser et de contrôler les vibrations avec précision. Bien qu'il existe d'autres outils de modélisation et de simulation, MapleSim propose une bibliothèque dédiée aux câbles et aux poulies qui lui a permis d'intégrer facilement la dynamique des câbles dans ses simulations.
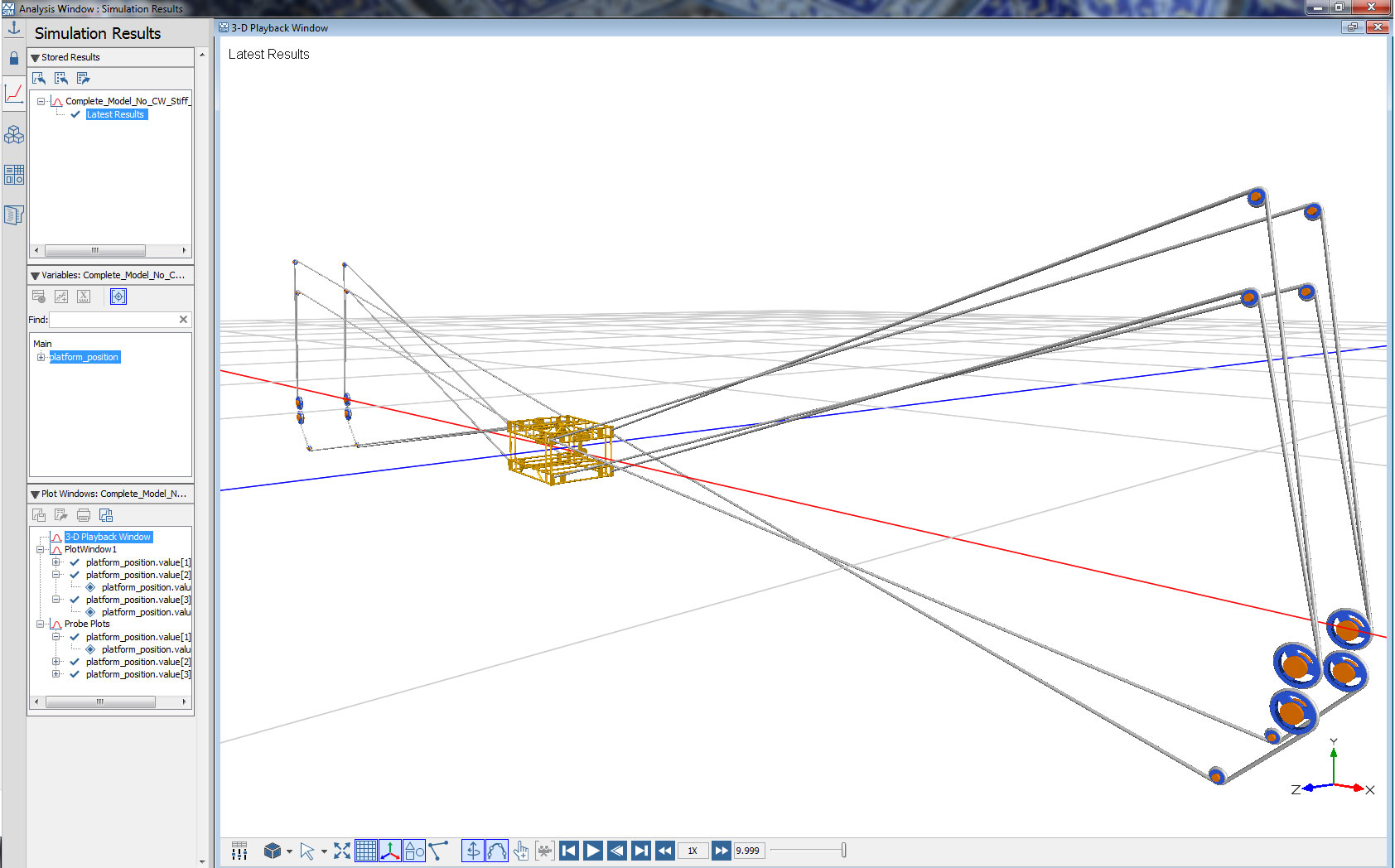
Figure 1 : Une visualisation 3D du modèle du Dr. Jamshidifar dans MapleSim.
Pour créer le modèle de robot dans MapleSim, le Dr Jamshidifar a importé son modèle CAO préexistant de la plateforme mobile du robot. En important son modèle CAO, il a pu automatiquement importer les géométries de la plateforme, les informations sur la masse et l'inertie, ainsi que les informations du modèle 3D à des fins de visualisation. Le modèle a ensuite été complété par la connexion de composants MapleSim standard, notamment des poulies, des treuils et des câbles. Pour tester le modèle, les treuils ont été actionnés par des forces simplifiées afin de simuler le mouvement du robot le long d'une trajectoire rectangulaire.
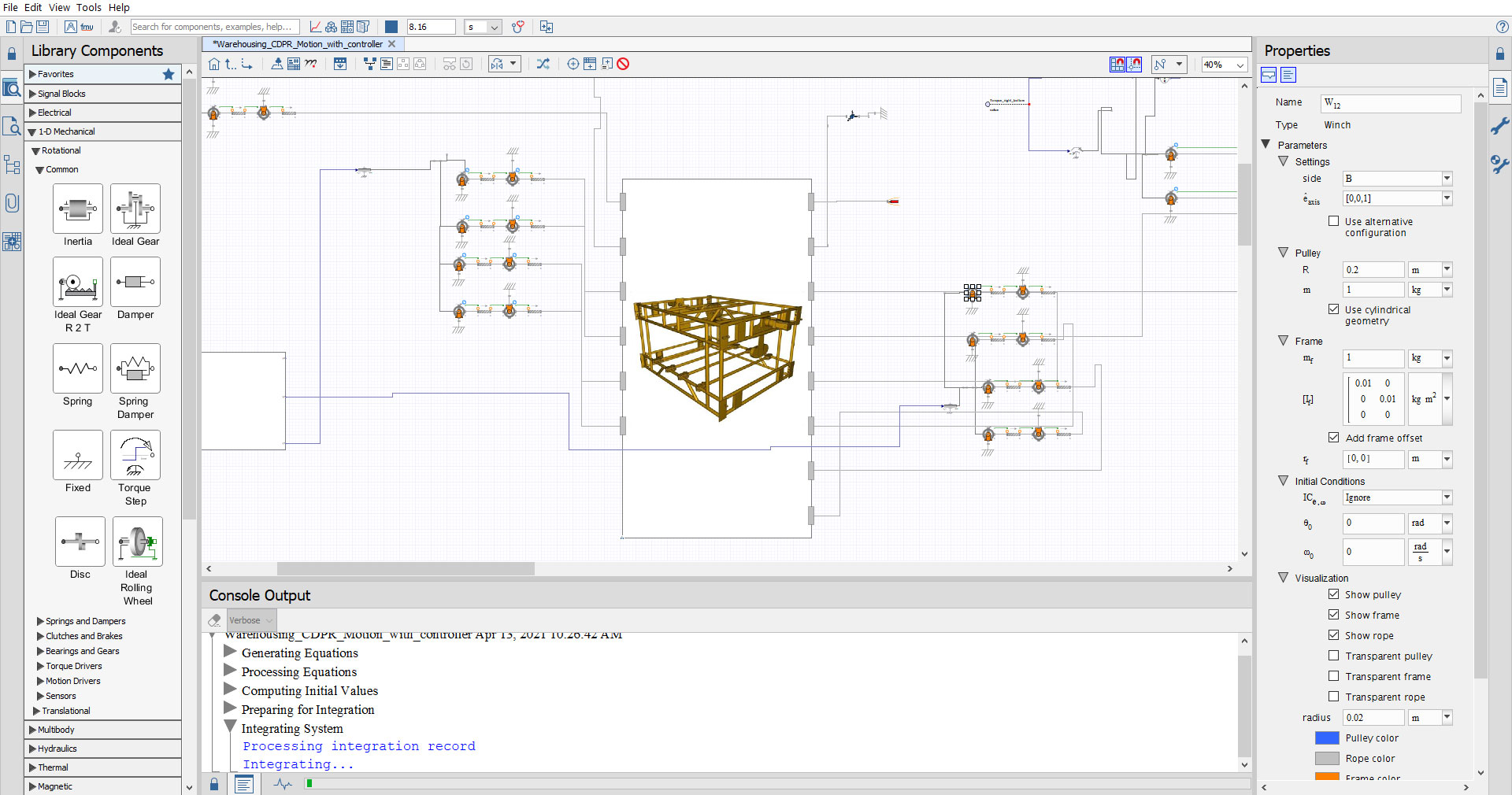
Figure 2 : Le modèle de robot à câbles d’entreposage dans MapleSim, montrant la plateforme centrale connectée aux systèmes de câbles et de treuils. Les paramètres du treuil sont visibles sur le côté droit de l'espace de travail de MapleSim.
Pour valider la précision du modèle, les résultats de la simulation ont été comparés à un prototype physique à petite échelle préalablement construit. Cela permettait de s'assurer que la dynamique de base du modèle MapleSim correspondait aux résultats attendus pendant le fonctionnement.
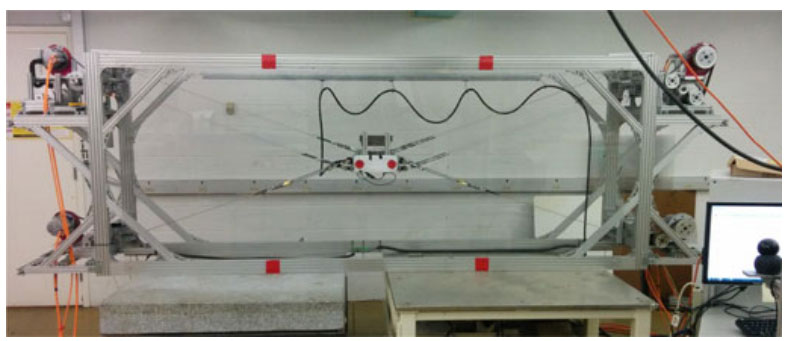
Figure 3 : Prototype physique à petite échelle du robot d’entreposage entraîné par des câbles.
Les résultats de la simulation du robot ont pu être visualisés dans MapleSim en utilisant une représentation 3D des systèmes de poulies en combinaison avec la CAO précédemment importée. Les premiers résultats de la simulation montrent les vibrations problématiques de la plateforme centrale. Sans un contrôle adéquat du mouvement, ces vibrations limiteraient à la fois la vitesse et la sécurité du fonctionnement du robot. Le modèle MapleSim sera utilisé pour tester et valider différentes stratégies de contrôle afin de minimiser ces vibrations, tout en permettant des vitesses de fonctionnement maximales en toute sécurité.
La deuxième série de résultats de simulation montre les résultats d'une stratégie de contrôle élémentaire pour minimiser les vibrations. Le mouvement a été comparé aux résultats précédents, non contrôlés, montrant les vibrations qui a ont été éliminées pendant le profil de mouvement. Les résultats de simulation illustrés ne sont encore que le produit de tentatives préliminaires de réduction des vibrations - le Dr Jamshidifar a l'intention de développer des stratégies de contrôle et des algorithmes qui réduiront davantage les vibrations dans toutes les conditions de fonctionnement.
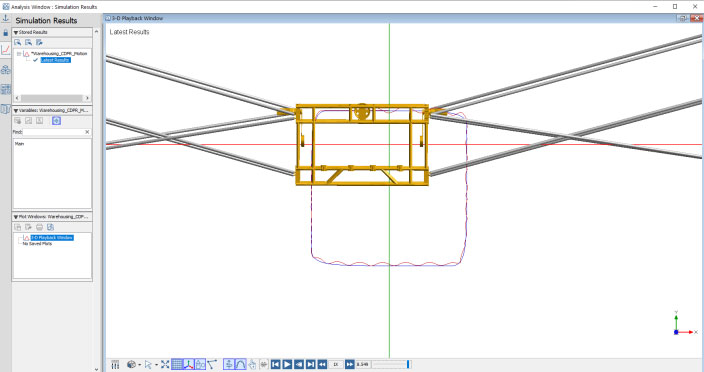
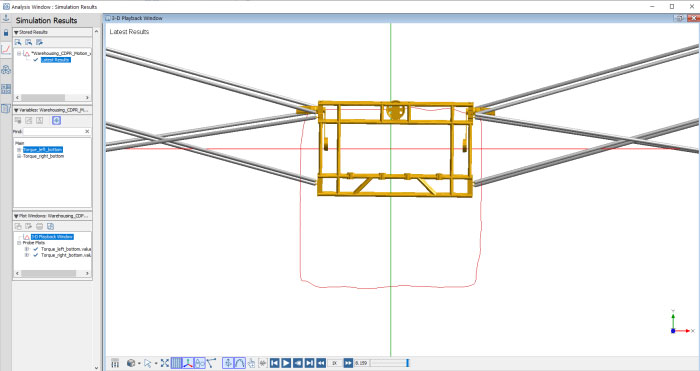
Figure 4 : Résultats visuels pour la vibration planaire du modèle de robot d’entreposage. La trajectoire du mouvement est tracée, et on peut voir qu'elle oscille sans contrôleurs de mouvement (à gauche), alors que les contrôleurs de mouvement stabilisent le mouvement de la plateforme (à droite).
Le Dr Jamshidifar a pu démontrer que les vibrations indésirables de son robot d'entreposage entraîné par câbles pouvaient être réduites au minimum grâce à des stratégies de contrôle appropriées. En continuant à utiliser MapleSim pour sa recherche et son développement, il sera en mesure de minimiser les risques de problèmes lors du développement de prototypes physiques, ayant déjà éliminé plusieurs problèmes dans le modèle MapleSim. Tout en poursuivant le développement du modèle de robot, M. Jamshidifar prévoit d'utiliser ses modèles MapleSim pour développer avec précision des stratégies de contrôle et des algorithmes qui permettront de commercialiser des robots plus rapides et plus performants pour les applications d'entreposage. L'équipe a actuellement développé un prototype à l'échelle réelle et prévoit de commercialiser le robot à l'avenir.

Figure 5 : un prototype grandeur nature du robot à câbles de magasinage.
![]() Contactez Maplesoft pour savoir comment MapleSim peut être utilise pour vas projets.
Contactez Maplesoft pour savoir comment MapleSim peut être utilise pour vas projets.
Produits
Secteur industriel/Domaine d’application