


Cas d’étude utilisateur:
Utilisation de MapleSim en Mécatronique et Contrôle à l’UCLA








Défi
A l’Université de Californie Los Angeles (UCLA), le Laboratoire de Mécatronique et de Contrôle effectue des recherches sur une gamme d’applications axées sur les contrôles, dont l’usinage, les commandes motrices et le nanopositionnement. L’équipe du laboratoire cherchait des outils logiciels leur apportant une meilleure compréhension de leurs systèmes afin de développer des contrôleurs plus précis et d’itérer désormais plus rapidement sur leur développement.
Solution
L’équipe du laboratoire de recherche a choisi MapleSim pour son analyse dynamique, lui donnant ainsi des modèles au niveau système plus précis, susceptibles de servir de bancs de tests à des fins à la fois de développement de contrôles et d’enseignement.
Résultat
Grâce à MapleSim, l’équipe a pu approfondir le développement et la compréhension de plusieurs de ses projets en mécatronique et contrôle. Dans certains cas, MapleSim a permis d’explorer la dynamique de ses machines et d’évaluer plus rapidement les stratégies de contrôle et, pour d’autres applications, l’équipe a utilisé MapleSim afin de mieux enseigner à ses étudiants les concepts de contrôle à l’aide de modèles interactifs.
Dans presque toutes nos activités quotidiennes, on trouve des technologies nouvelles et complexes pour améliorer notre qualité de vie. Bien qu’elles puissent être très différentes, ces technologies partagent souvent une seule origine : les laboratoires de recherche des établissements universitaires. Ces laboratoires, comme le Laboratoire de Mécatronique et de Contrôle de l’UCLA, développent et affinent de nouvelles technologies destinées à de futures applications industrielles.
En qualité de chef du Laboratoire de Mécatronique et de Contrôle, le Professeur Tsu-Chin Tsao oriente les recherches de son équipe, consacrées essentiellement aux applications d’usinage de précision, commandes moteur et nanopositionnement axées sur les contrôles. Pour la conception et le contrôle de machines de précision, les outils de simulation fournissent des informations essentielles sur les performances de la machine elle-même dans différentes conditions d’exploitation. De meilleures données de simulation influent directement sur la facilité et la précision de développement des stratégies de contrôle.
Dans le cadre de ses recherches et de son rôle en enseignement, l’équipe a récemment adopté MapleSim, l’outil de simulation et de modélisation de Maplesoft, afin de créer des modèles dynamiques de ses projets de recherche. Avec ces modèles dynamiques de MapleSim, l’équipe a pu étudier plus facilement les performances potentielles de ses produits dans différentes situations. Les résultats de simulation l’ont aidée à développer de meilleures stratégies de contrôle pour divers projets et ont servi d’outil pédagogique pour démontrer des concepts à leurs étudiants. Trois projets différents sont exposés ci-dessous, présentant leur développement et leurs essais avec MapleSim.
Contrôle par apprentissage itératif de robots manipulateurs
Le suivi de trajectoire des robots manipulateurs est une technologie capitale dans différents secteurs industriels en raison de ses applications dans de nombreux procédés de fabrication tels que la soudure, le polissage, la dépose de colle et la découpe au laser. Le caractère répétitif de ces tâches fait du contrôle par apprentissage itératif (ILC) une stratégie qui utilise les informations d’essais préalables pour améliorer les essais ultérieurs, une technique prometteuse en vue de meilleures stratégies de contrôle. La plupart des robots industriels font appel à des motoréducteurs du fait de leur faible coût, de leur couple élevé et de leurs dimensions compactes. Suite à l’utilisation de motoréducteurs, le couple externe variable est atténué par la démultiplication, permettant ainsi à l’équipe de modéliser la manipulation en tant que système mono entrée/mono sortie (SISO).
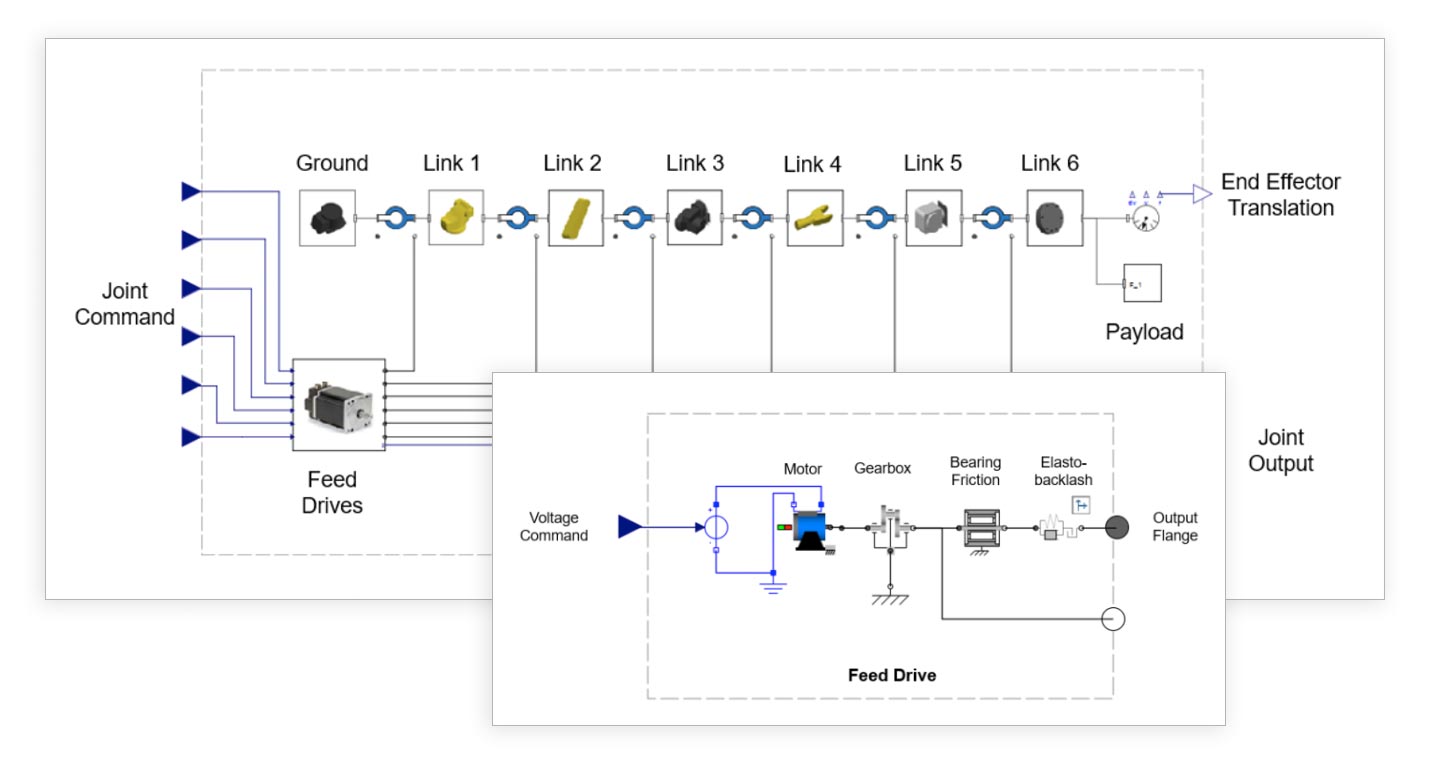
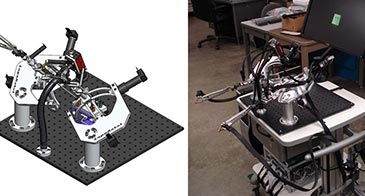
Figure 1 : Le modèle MapleSim de robot manipulateur RH-12, montrant à la fois le modèle multicorps et la conception d’un sous-système de commande d’avance unique.
Dans cette étude, l’équipe a évalué la pertinence d’une stratégie ILC pour améliorer les performances de suivi et contrôle [1]. Pour accélérer la vitesse de convergence et réduire les itérations requises, un modèle dynamique a été développé, utilisant des données de cinématique inverse pour fournir au contrôleur des données d’entrée. L’algorithme développé a été testé sur un modèle de robot manipulateur à 6 degrés de liberté (DoF) construit dans MapleSim (Figure 1). A l’aide du modèle dynamique de MapleSim, l’équipe a également étudié l’algorithme ILC dans des scénarios courants ayant une incidence sur les mouvements du robot, comme par exemple l’élasticité des articulations, les frottements et le jeu des engrenages. L’équipe a comparé les données ILC à une conception type non ILC et relevé d’importantes améliorations grâce à ses algorithmes ILC (Figure 2).
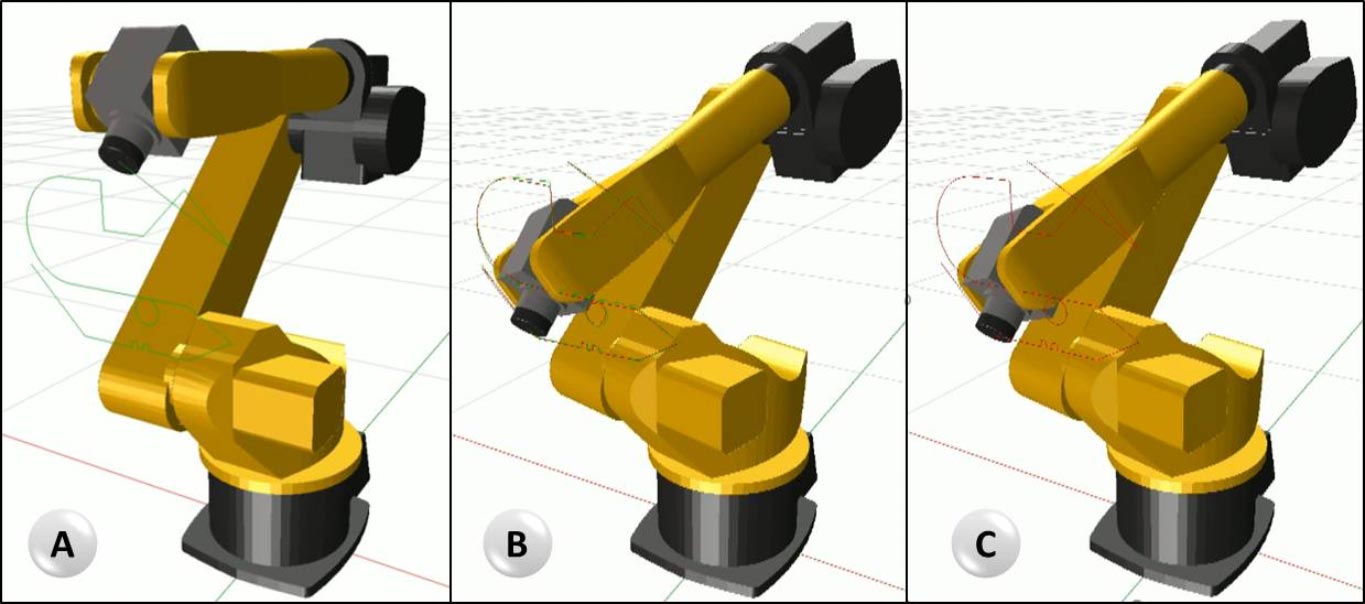
Figure 2 : Résultats des performances de suivi PID de base par rapport aux performances de suivi ILC, où (A) est la trajectoire de référence, (B) la trajectoire du régulateur PID initial avec des écarts (en rouge), et (C) la trajectoire d’algorithme ILC avec pratiquement aucun écart perceptible par rapport à la trajectoire de référence.
Système robotisé de télémentorat et formation en chirurgie laparoscopique
Le LapaRobot a été mis en place comme une plate-forme visant à aider les stagiaires à acquérir les compétences requises en chirurgie laparoscopique, qui fait appel à des câbles à fibres optiques insérés avec une grande précision dans la paroi abdominale [2]. Le système LapaRobot se compose d’une station expert et d’une station d’apprentissage reliée par une connexion Internet. Grâce à des actionneurs intégrés, la station d’apprentissage peut être pilotée par un chirurgien expert de manière à faire assimiler les bonnes techniques aux stagiaires en bénéficiant d’une rétroaction physique. La trajectoire de l’instrument chirurgical et le flux vidéo peuvent être enregistrés et revues plus tard par le stagiaire pour parfaire ses compétences dans le cadre de répétitions guidées sans nécessiter la supervision d’un expert. Le système est conçu pour créer une approximation haute-fidélité de l’espace de travail chirurgical, intégrer les instruments chirurgicaux disponibles sur le marché et fournir une large gamme de données haute résolution pour une analyse quantitatives.
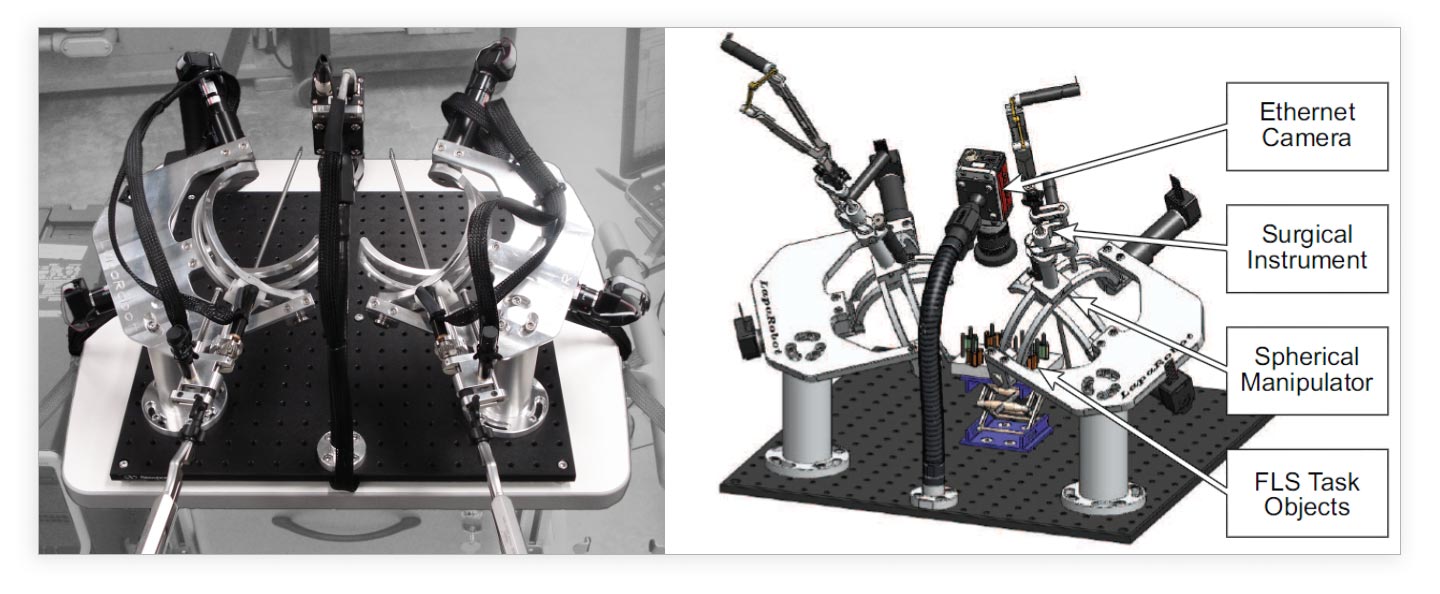
Figure 3 : Le système chirurgical LapaRobot (à gauche) et le modèle CAD décrivant les différents aspects de la conception (à droite).
Le modèle cinématique a été construit dans MapleSim pour évaluer les exigences de conception, comme par exemple l’amplitude de mouvement. A l’aide de la boîte à outils CAD de MapleSim, les informations CAD LapaRobot ont été importées dans MapleSim et les composants ont été connectés conjointement avec des articulations révolutées prismatiques (Figure 4). Grâce à ce modèle, les informations d’amplitude de mouvement ont pu être extraites dans différentes conditions de fonctionnement. D’autres propriétés, comme l’inertie, la dynamique du moteur et les frottements, peuvent être intégrés pour mieux simuler la dynamique d’ensemble du système et faciliter la conception de meilleurs algorithmes de contrôle.
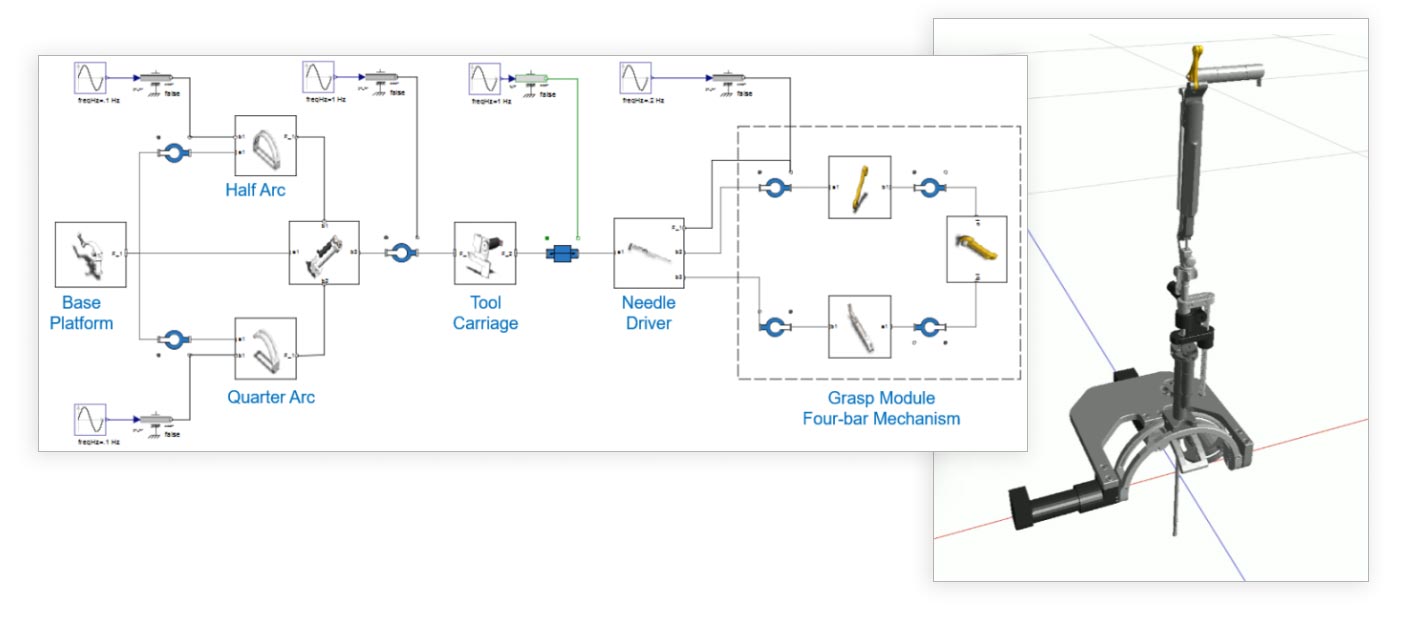
Figure 4 : On peut voir ici la disposition des composants sur le modèle MapleSim (à gauche), et le bras droit du modèle dans la fenêtre des résultats de la simulation 3D de MapleSim (à droite).
Un quadricoptère multi-rotors novateur à torsion et inclinaison
Un système novateur de quadrirotor a été développé en s’appuyant sur les résultats de simulation dynamique de MapleSim [3]. Chaque hélice de ce quadrirotor est constituée de deux articulations rotatives supplémentaires, qui fournissent à la pale d’hélice des capacités de torsion et d’inclinaison tout en permettant à l’hélice de générer une poussée dans toutes les directions (Figure 5). Le quadrirotor possède 12 degrés de liberté (DoF) et est sur-actionné dans un espace tridimensionnel pour assurer un meilleur contrôle. Par rapport aux quadrotors sous-actionnés classiques, le quadrotor à torsion et inclinaison est capable de suivre une trajectoire tout en conservant l’orientation souhaitée, d’où une souplesse de mouvement accrue avec un meilleur rendement énergétique.
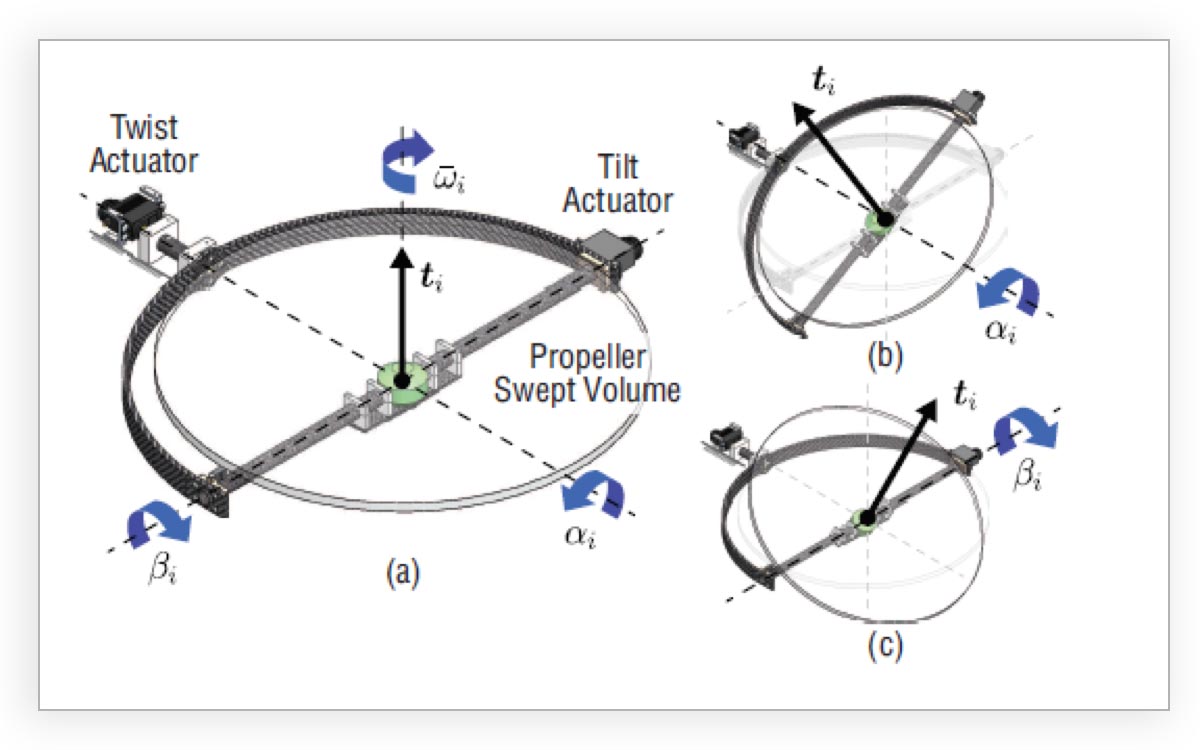
Figure 5 : Configuration d’une seule hélice, mettant en lumière les actionneurs de torsion et d’inclinaison.
A l’aide de MapleSim, la dynamique de chacun des composants du quadrirotor a été évaluée par des résultats de simulation. La dynamique des servomoteurs d’articulation ainsi que celle des moteurs propulseurs sont incluses dans le modèle, et des capteurs de locomotion ont été ajoutés au système là où c’était nécessaire. Le modèle MapleSim complet a ensuite été exporté sous forme de fonction S Simulink à l’aide du connecteur MapleSim de façon à développer les algorithmes de contrôle. Pour tester le système, une sonde de contact a été fixée sous le quadrotor pour fournir des informations sur les efforts de contact. Grâce à cette rétroaction, les performances du quadrirotor ont été simulées lors de simples tâches d’inspection des surfaces variables (Figure 6).
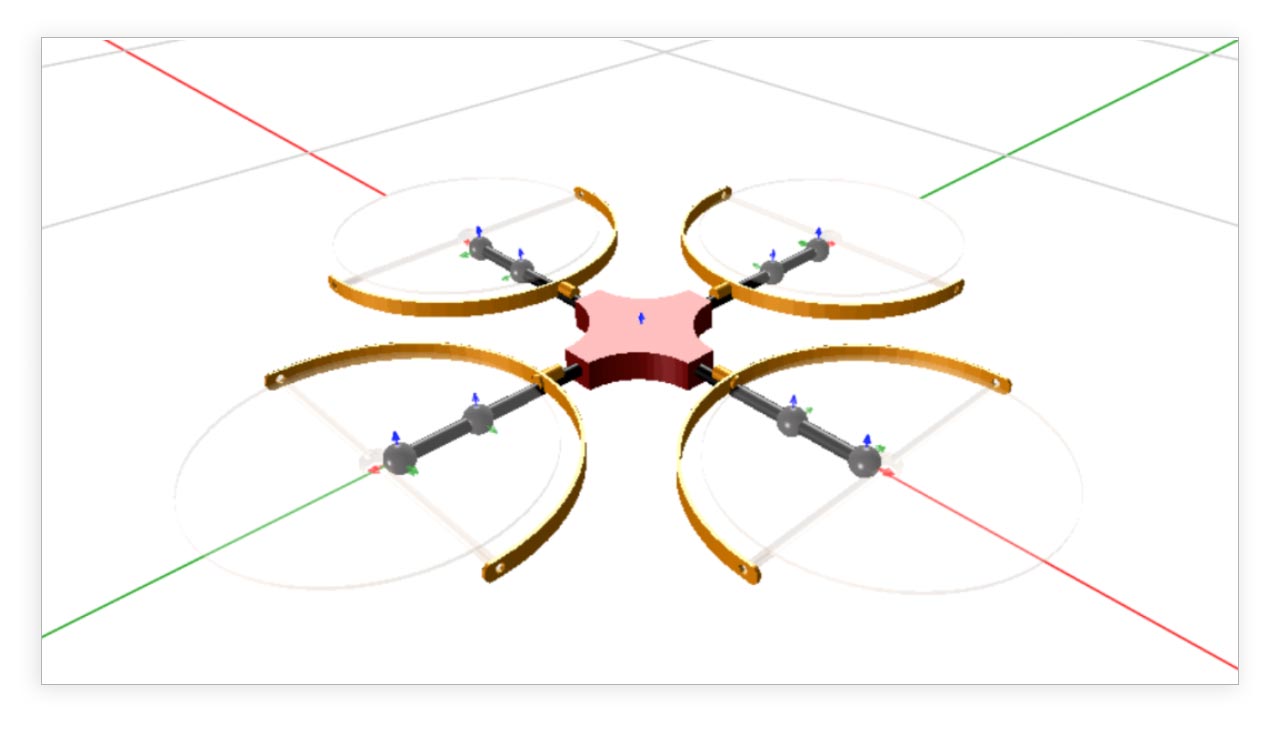
Figure 6 : Le modèle 3D dans MapleSim, utilisé pour visualiser les performances du quadrirotor lors des différentes simulations.
A l’avenir
Grâce à MapleSim, le Professeur Tsao et son équipe ont mis au point de nouvelles méthodes de développement, d’expérimentation et de formation au sein du Laboratoire de Mécatronique et de Contrôle de l’UCLA. Ces projets ont bénéficié des différentes fonctionnalités de MapleSim, qu’il s’agisse de capacités de visualisation ou de connectivité d’exportation de modèles, et contribué respectivement aux objectifs de recherche et d’enseignement du laboratoire. Rendez-vous sur le site web du Professeur Tsao pour en savoir plus sur les projets en cours au Laboratoire de Mécatronique et de Contrôle.
Références
![]() Contactez Maplesoft pour savoir comment Maple peut être utilise pour vas projets
Contactez Maplesoft pour savoir comment Maple peut être utilise pour vas projets