Etude de cas d’utilisateur :
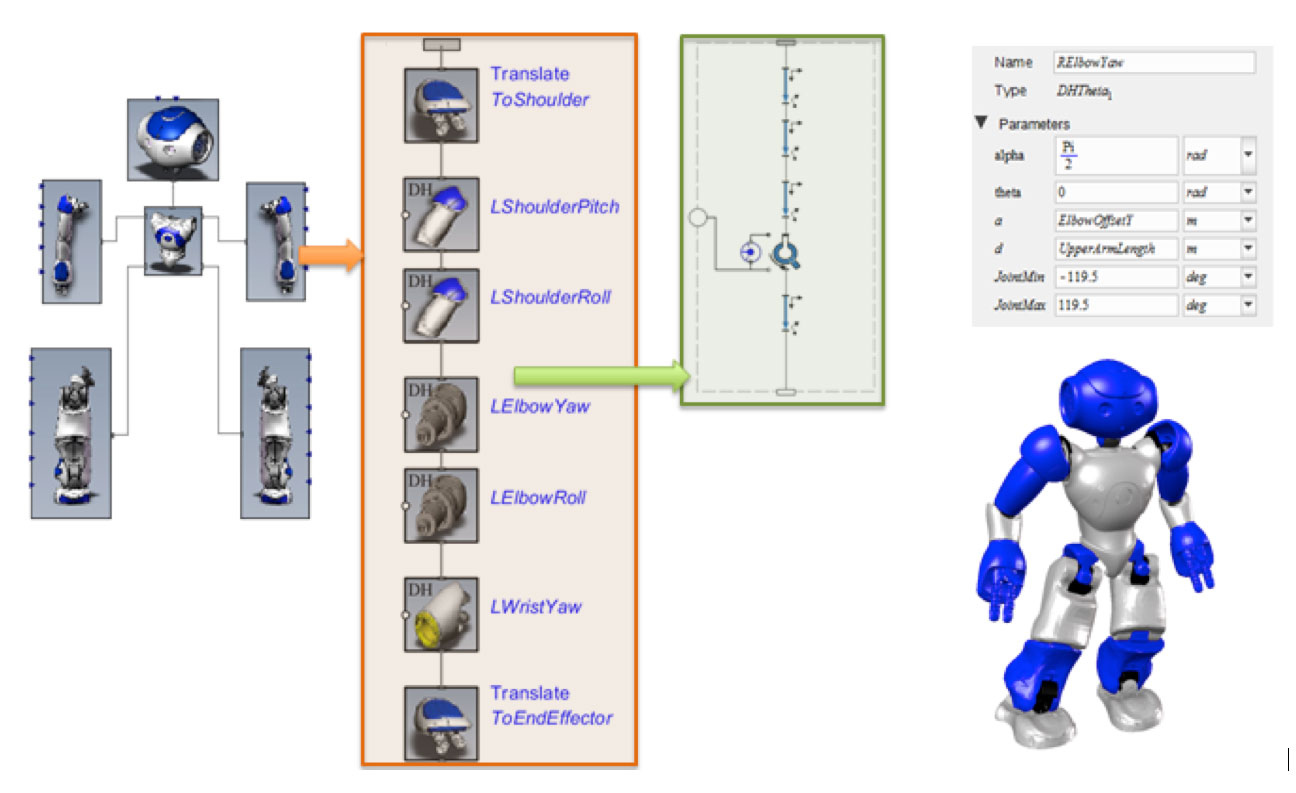
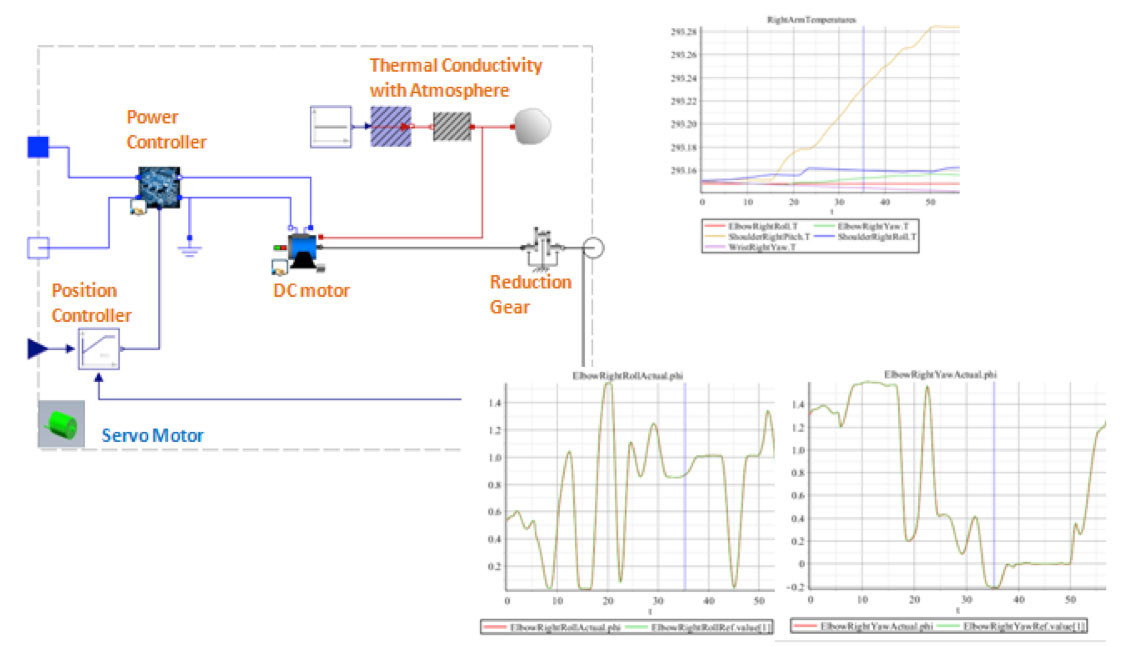
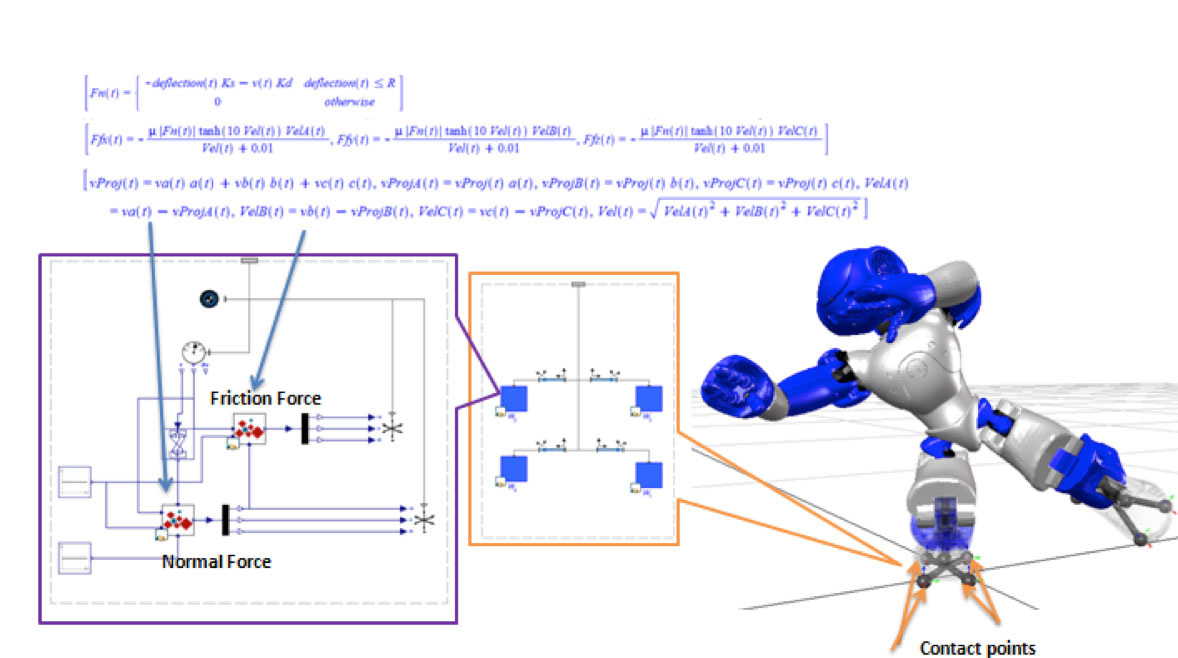
Modélisation du robot NAO dans MapleSim
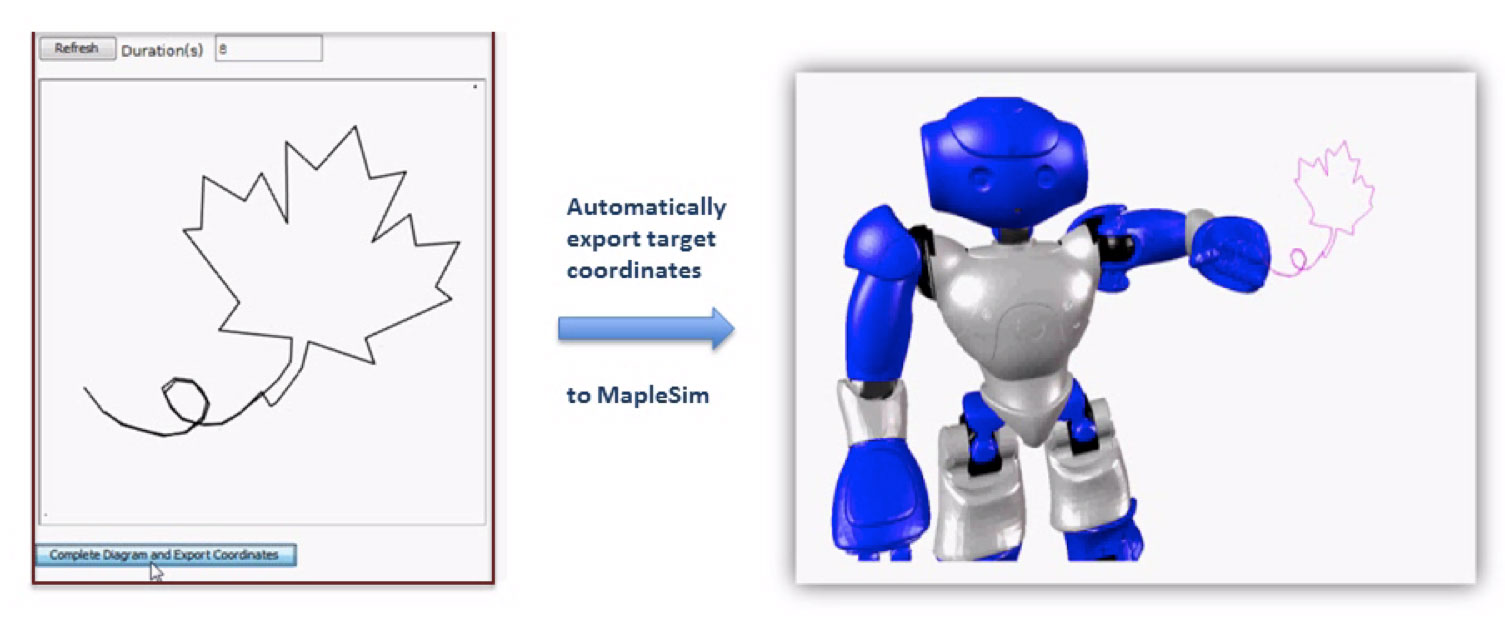
Mise en œuvre des techniques modernes pour réduire sensiblement le temps de développement du modèle, fournir une meilleure connaissance du comportement du système et produire rapidement des simulations extrêmement fidèles.